In Tipping Point, the behavior of the robot changes when carrying a goal because its speed and acceleration are different. Because the moving target point is always moving forward at the same speed, it means that the robot can fall behind the path.
No clear solution for this yet.
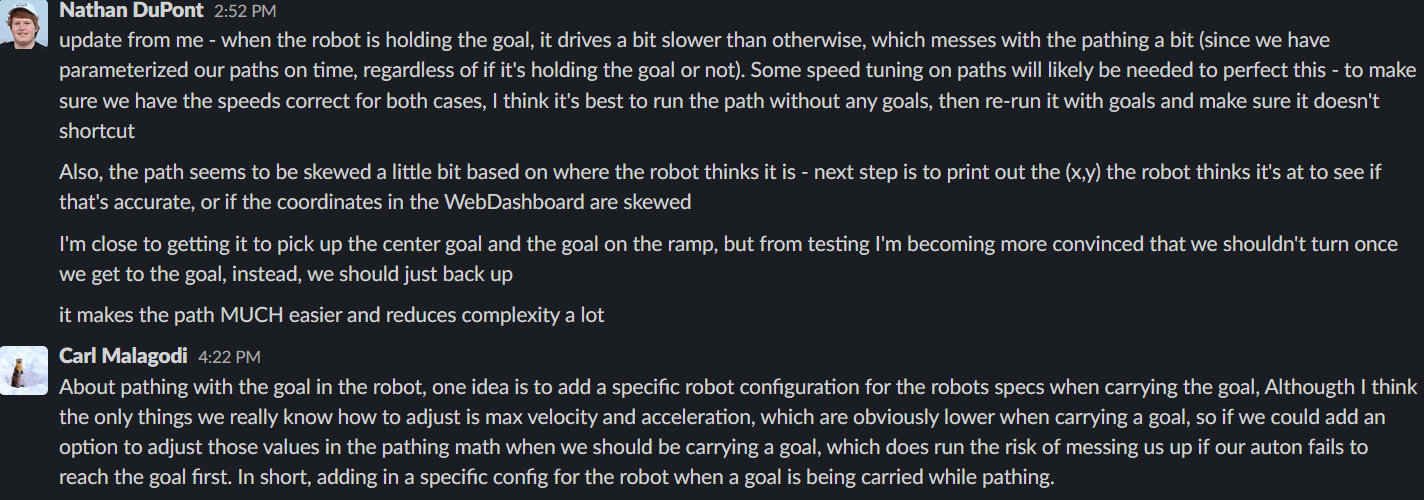
Screenshot of slack communication about this issue for context:
In Tipping Point, the behavior of the robot changes when carrying a goal because its speed and acceleration are different. Because the moving target point is always moving forward at the same speed, it means that the robot can fall behind the path.
No clear solution for this yet.
Screenshot of slack communication about this issue for context:
